- A+
文章主要从两方面进行讨论:1.简单模型的仿真精度校验(一对直齿锥齿轮对);2.差速器系统差速状态空载实验仿真任何仿真都不是仅仅为了得到一个收敛性的结果的,所以使用简单的模型进行仿真精度校验是非常有必要的.在使用该方法标定精度后, 通过相同的仿真思路与方法得到的仿真结果的精度,就可以得到一定程度的保证.
01 锥齿轮模型的建立
笔者采用KISSSoft建立锥齿轮模型, 目的是为了得到准确的锥齿轮模型,并可以导出为stp格式用于划分有限元网格. 并且可以使用KISSsoft进行一对锥齿轮的强度校核,并将该结果用于与有限元的标定.
KISSsoft建立锥齿轮对有以下注意事项:
1.其基准齿廓的齿根高系数和齿顶高系数等参数均为齿宽中点处的数值, 这一点与我国国内的习惯不相同(国内图纸习惯于标注锥齿轮大端参数)
2.其中点齿根高和齿顶高以及齿根高系数和齿顶高系数均受其齿制的影响, 其中等顶隙锥齿轮对(Gleason)齿宽中点处和大端处的参数换算方法, 我已使用Python进行了编制, 初步认为是准确的, 后续工作中如果确认了该转换方法的准确性, 我将会将之更新到论坛上。

02 该锥齿轮对KISSsoft校核
使用锥齿轮静态校核方法, 输入扭矩100Nm, 转速106rpm, 应用系数默认1.25, 来计算齿根应力和赫兹接触应力.

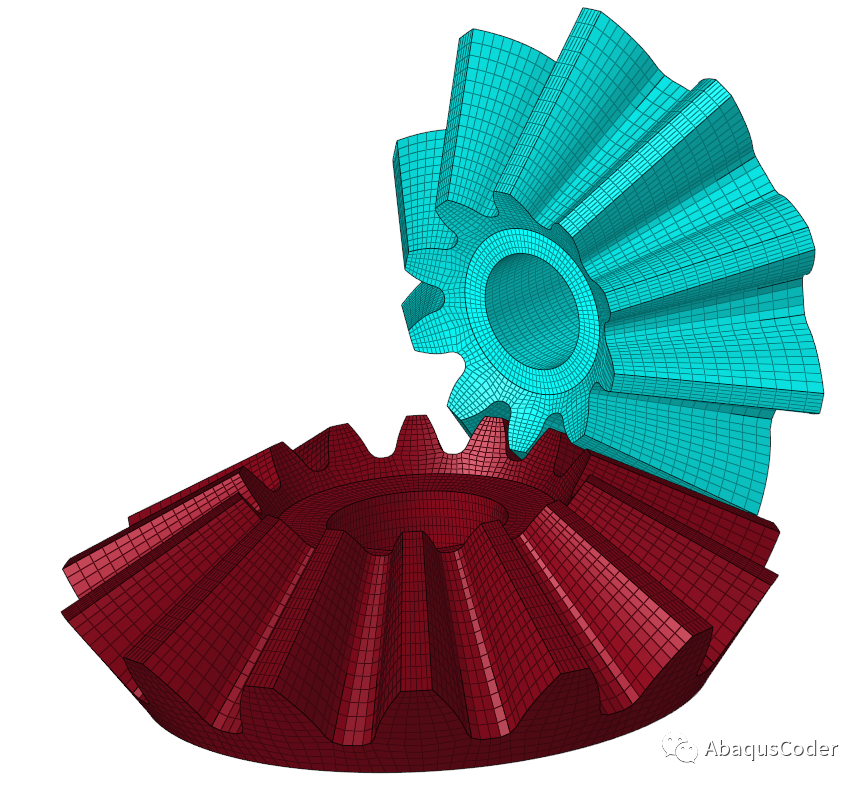
03 有限元模型构建
使用HyperMesh建立锥齿轮的六面体有限元网格, 注意控制网格质量与数量. 由于我们要是用ANSYS WorkBench求解,所以我们要采用ABAQUS模板导出为inp格式文件,因为WorkBench和ABAQUS接口做的非常好.
04 有限元仿真
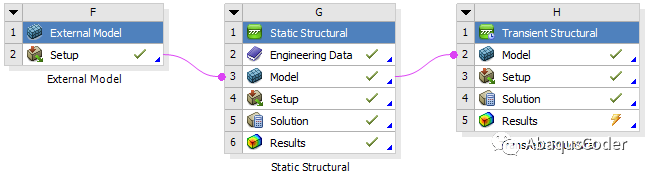
我们需要进行两个仿真,一个是静力学仿真一个是动力学仿真. 静力学仿真的意义是对模型的一个判断,看看模型能否正常计算,齿轮能否正常啮合(有的时候由于齿轮齿隙不正确, 会导致计算错误), 以及接触生效时齿轮所需空转的角度, 这种方法的验错成本较直接使用动力学求解更低.
齿轮分析的注意事项:
- 最重要的一点是, 齿轮分析过程中不应该调整接触面, 即Geometric Modification中的interface treatment应该设置为0. 这一点对于锥齿轮尤为重要;
- 由于上一点的原因, 不可以避免的要存在齿轮空转的情况(齿轮对的齿隙),所以设置的齿轮转动副应赋予一点的转动刚度(该转动刚度在现实中也是必然存在的,只不过很难弄清楚其准确的数值), 以避免齿轮接触产生的瞬间导致的数值奇异,该空转角度可以自行手动求解出来, 并使用静力学求解验证一下, 然后由于动力学求解.
- 动力学求解时, 由于转速较高, 应避免给予阶跃式的变化,避免引起不收敛.
- 动力学求解最关键的参数之一,就是载荷步大小的给定, 太大了会导致不收敛,太小了,太过于浪费时间和空间. 其具体大小主要取决于转速和齿数, 应注意每一个载荷步内, 其接触变化不应过于剧烈.
- 接触应力的求解受限于其基础理论, 需要根据使用经验来调整接触参数(对于齿轮对来说主要就是接触法向刚度).




